 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBifrostUMI: Bridging Robot-Free Demonstrations and Humanoid Whole-Body Manipulation
May 05, 2026High-quality data collection is a fundamental cornerstone for training humanoid whole-body visuomotor policies. Current data acquisition paradigms predominantly rely on robot teleoperation, which is often hindered by limited hardware accessibility and low operational efficiency. Inspired by the Universal Manipulation Interface (UMI), we propose BifrostUMI, a portable, efficient, and robot-free data collection framework tailored for humanoid robots. BifrostUMI leverages lightweight VR devices to capture human demonstrations as sparse keypoint trajectories while simultaneously recording wrist-mounted visual data. These multimodal data are subsequently utilized to train a high-level policy network that predicts future keypoint trajectories conditioned on the captured visual features. Through a robust keypoint retargeting pipeline, keypoint trajectories are precisely mapped onto the robot's morphology and executed via a whole-body controller. This approach enables the seamless transfer of diverse and agile behaviors from natural human demonstrations to humanoid embodiments. We demonstrate the efficacy and versatility of the proposed framework across two distinct experimental scenarios.
Dual-Regime Hybrid Aerodynamic Modeling of Winged Blimps With Neural Mixing
Feb 25, 2026Winged blimps operate across distinct aerodynamic regimes that cannot be adequately captured by a single model. At high speeds and small angles of attack, their dynamics exhibit strong coupling between lift and attitude, resembling fixed-wing aircraft behavior. At low speeds or large angles of attack, viscous effects and flow separation dominate, leading to drag-driven and damping-dominated dynamics. Accurately representing transitions between these regimes remains a fundamental challenge. This paper presents a hybrid aerodynamic modeling framework that integrates a fixed-wing Aerodynamic Coupling Model (ACM) and a Generalized Drag Model (GDM) using a learned neural network mixer with explicit physics-based regularization. The mixer enables smooth transitions between regimes while retaining explicit, physics-based aerodynamic representation. Model parameters are identified through a structured three-phase pipeline tailored for hybrid aerodynamic modeling. The proposed approach is validated on the RGBlimp platform through a large-scale experimental campaign comprising 1,320 real-world flight trajectories across 330 thruster and moving mass configurations, spanning a wide range of speeds and angles of attack. Experimental results demonstrate that the proposed hybrid model consistently outperforms single-model and predefined-mixer baselines, establishing a practical and robust aerodynamic modeling solution for winged blimps.
Deep learning-based survival prediction for multiple cancer types using histopathology images
Dec 16, 2019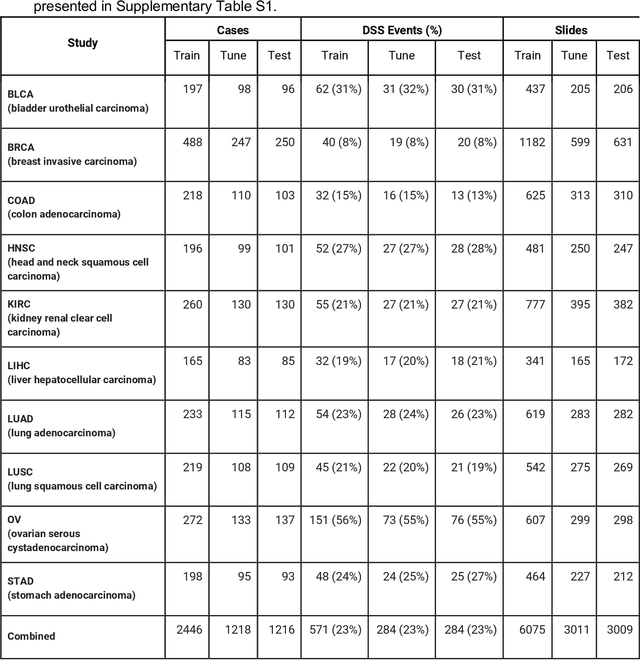
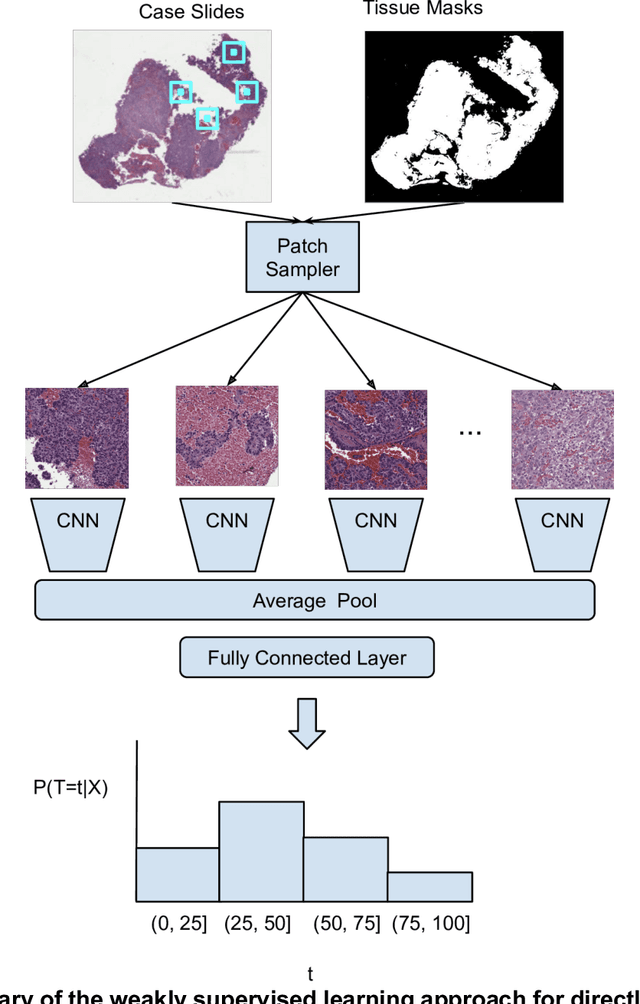
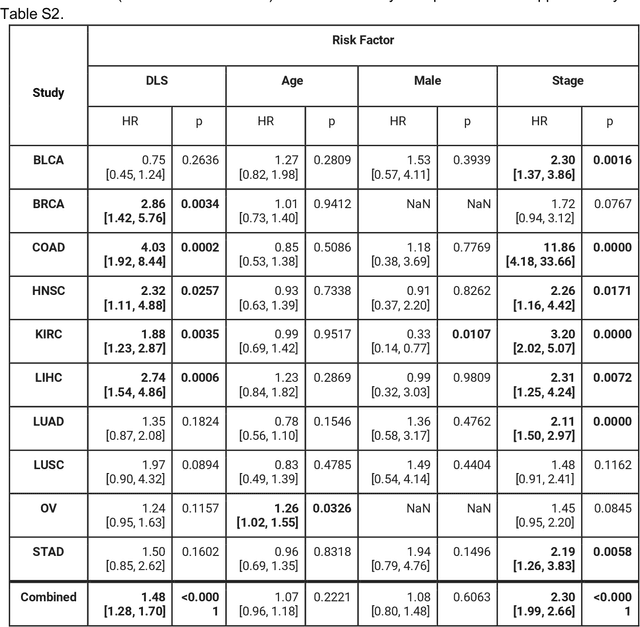
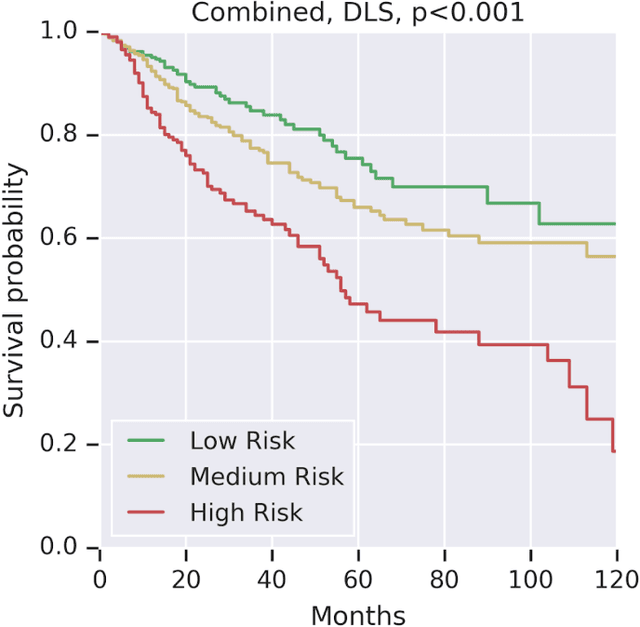
Prognostic information at diagnosis has important implications for cancer treatment and monitoring. Although cancer staging, histopathological assessment, molecular features, and clinical variables can provide useful prognostic insights, improving risk stratification remains an active research area. We developed a deep learning system (DLS) to predict disease specific survival across 10 cancer types from The Cancer Genome Atlas (TCGA). We used a weakly-supervised approach without pixel-level annotations, and tested three different survival loss functions. The DLS was developed using 9,086 slides from 3,664 cases and evaluated using 3,009 slides from 1,216 cases. In multivariable Cox regression analysis of the combined cohort including all 10 cancers, the DLS was significantly associated with disease specific survival (hazard ratio of 1.58, 95% CI 1.28-1.70, p<0.0001) after adjusting for cancer type, stage, age, and sex. In a per-cancer adjusted subanalysis, the DLS remained a significant predictor of survival in 5 of 10 cancer types. Compared to a baseline model including stage, age, and sex, the c-index of the model demonstrated an absolute 3.7% improvement (95% CI 1.0-6.5) in the combined cohort. Additionally, our models stratified patients within individual cancer stages, particularly stage II (p=0.025) and stage III (p<0.001). By developing and evaluating prognostic models across multiple cancer types, this work represents one of the most comprehensive studies exploring the direct prediction of clinical outcomes using deep learning and histopathology images. Our analysis demonstrates the potential for this approach to provide prognostic information in multiple cancer types, and even within specific pathologic stages. However, given the relatively small number of clinical events, we observed wide confidence intervals, suggesting that future work will benefit from larger datasets.